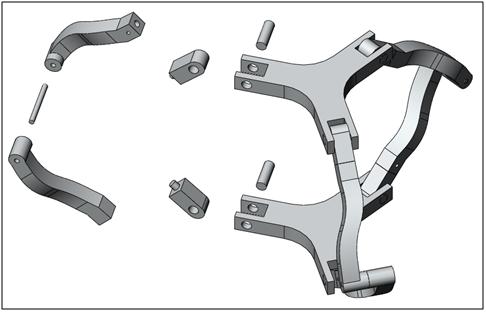
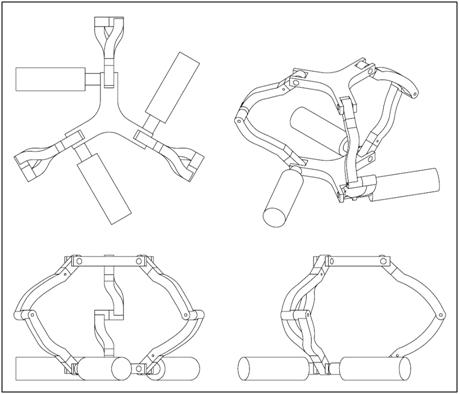
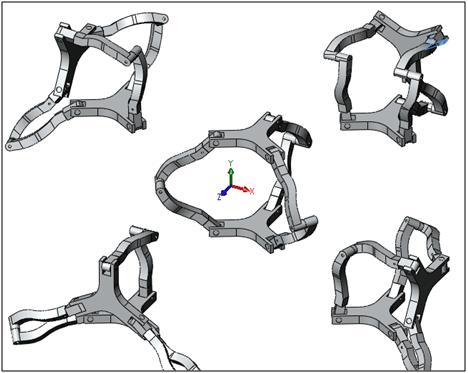
The Canfield Joint is primarily composed of six arms, three roll joints, and two mounts - all symmetric about the horizontal plane. It is designed to offer two degree-of-freedom of motion - pitch and roll, or theta and phi in the spherical coordinate system. The joint is actuated by three brushless DC motors, connected with flexible couplings to shafts at the bottom of each arm as depicted in the 3D models shown here. This design provides full hemispherical motion of the normal vector of the top plate, as viewed relative to the stationary bottom base.
Design